
机器人考试三级实操考试
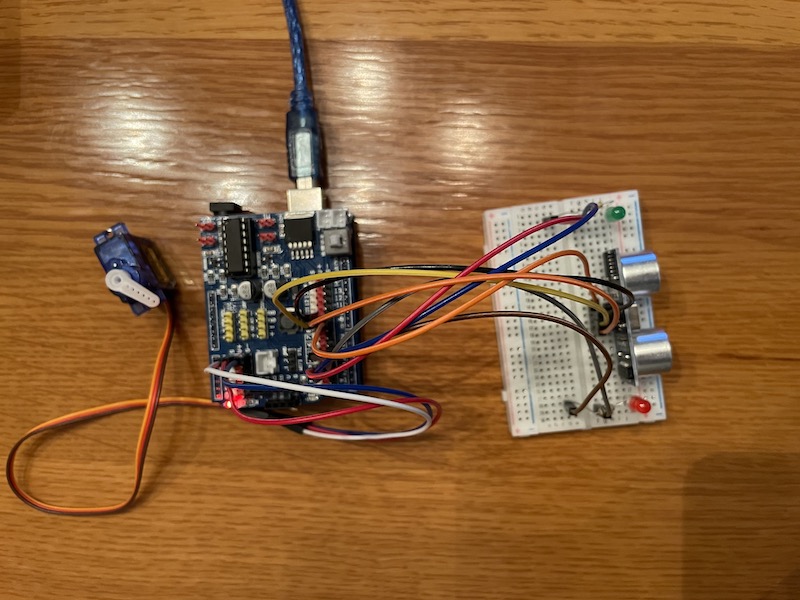
三月份的机器人三级考试我的实操没有通过,今天再战。仍然是Mixly的软件环境 + Adruino UNO R3 主板。
主题: 距离指示器
器件
- LED灯模块2个(分别为LED_A和LED_B)
- 超声波传感器1个
- 舵机1个(也可使用分立器件结合面包板搭建)
要求
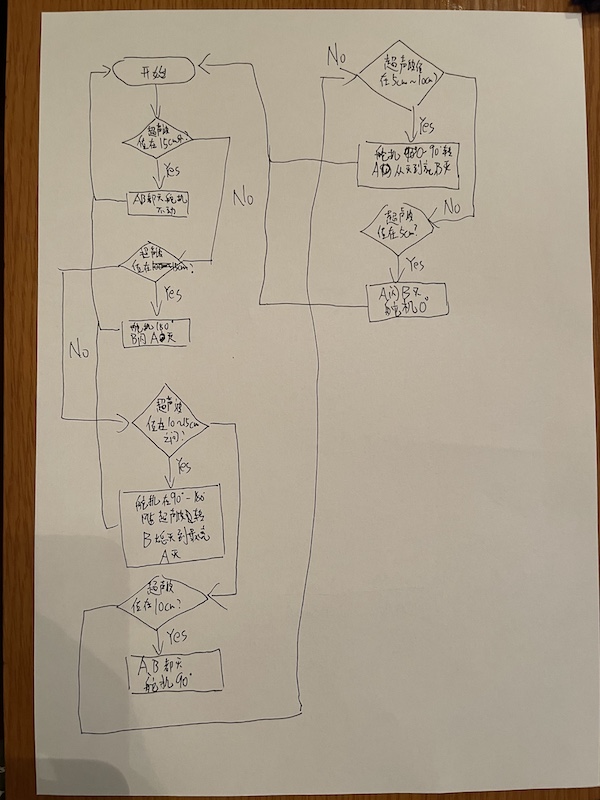
- 通过超声波传感器检测距离的变化,并根据检测距离控制舵机的转动角度和LED灯的亮灭。
- 将超声波传感器检测的距离值显示在串口监视器。
- 当超声波传感器检测的距离为10cm时,舵机处于90度位置,LED_A和LED_B均熄灭。
- 当超声波传感器检测距离为5cm时,舵机处于0度位置,LED_A闪烁,LED_B熄灭。
- 当超声波传感器检测的距离在10cm至5cm之间变化时,舵机的转动角度为90~0度所对应的角度,LED_A从熄灭至最亮,LED_B保持熄灭状态。
- 当超声波传感器检测距离为15cm时,舵机处于180度位置,LED_B闪烁,LED_A熄灭。
- 当超声波传感器检测的距离在10cm至15cm之间变化时,舵机的转动角度为90~180度所对应的角度,LED_B从熄灭至最亮,LED_A保持熄灭状态。
- 根据上述要求,绘制流程图。
- 未作规定处可自行处理,无明显与事实违背即可。
- 程序编写过程中不得打开库例程和其它程序,如发现,实操成绩按照0分处理。
{kind=link}
{kind=link}